简介
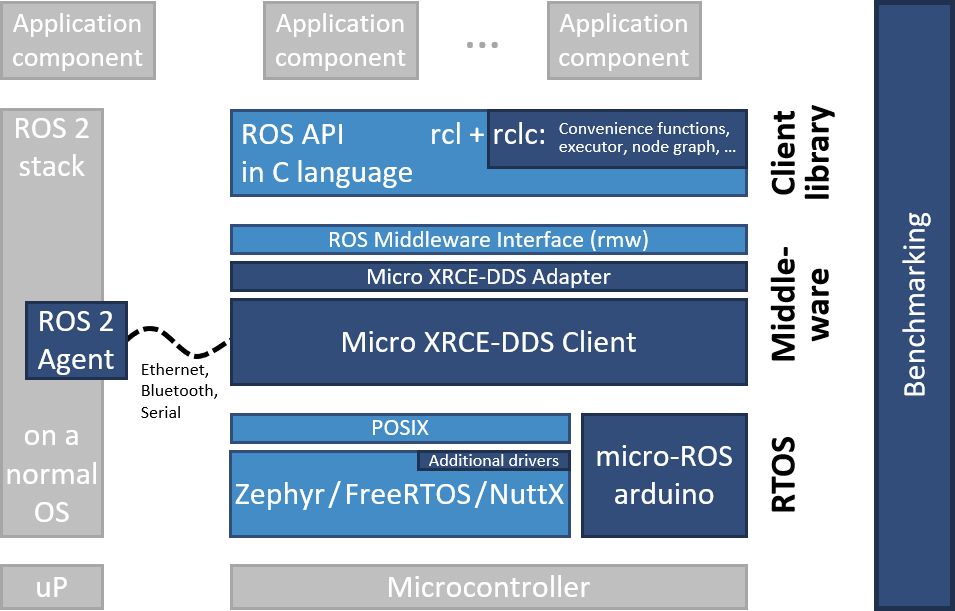
micro-ROS 运行在嵌入式设备上,旨在与 Linux 设备上运行的ROS2节点进行通信。
结构如下图:
准备工作
交叉工具链下载
bash
# 下载GNU for ARM 工具链,注意 Humble 建议使用 gcc13.2 ,14版本与教程有兼容性问题。
wget https://developer.arm.com/-/media/Files/downloads/gnu/13.2.rel1/binrel/arm-gnu-toolchain-13.2.rel1-x86_64-arm-none-eabi.tar.xz
# 解压
tar -xf arm-gnu-toolchain-13.2.rel1-x86_64-arm-none-eabi.tar.xz
# 移动到 /opt 文件夹下,不需要的时候直接删除文件夹
sudo mv arm-gnu-toolchain-13.2.Rel1-x86_64-arm-none-eabi /opt/
# 在.bashrc中添加路径
export PATH=$PATH:/opt/arm-gnu-toolchain-13.2.rel1-x86_64-arm-none-eabi/bin
# 查看版本检查是否添加成功
arm-none-eabi-gcc -vrosdep 换源
bash
# 编辑镜像源文件
sudo vim /etc/ros/rosdep/sources.list.d/20-default.list
# 将里面所有的镜像源注释掉,替换为下面内容:清华镜像源
yaml https://mirrors.tuna.tsinghua.edu.cn/rosdistro/rosdep/osx-homebrew.yaml osx
yaml https://mirrors.tuna.tsinghua.edu.cn/rosdistro/rosdep/base.yaml
yaml https://mirrors.tuna.tsinghua.edu.cn/rosdistro/rosdep/python.yaml
yaml https://mirrors.tuna.tsinghua.edu.cn/rosdistro/rosdep/ruby.yaml
gbpdistro https://mirrors.tuna.tsinghua.edu.cn/rosdistro/releases/fuerte.yaml fuerte
# 保存退出后更新
rosdep update构建 micro-ROS 工作区
micro-ROS 通过 micro_ros_setup 包构建
bash
# 激活 ROS2 环境
source /opt/ros/$ROS_DISTRO/setup.bash
# 创建工作区
mkdir uros_ws && cd uros_ws
# 拉取构建环境
git clone -b $ROS_DISTRO https://github.com/micro-ROS/micro_ros_setup.git src/micro_ros_setup
# 下载环境依赖,确保 rosdep 已经换源
rosdep update && rosdep install --from-paths src --ignore-src -y
# 构建
colcon build
# 加载环境变量
source install/local_setup.bash
# 构建基本库环境,这一步网络不好容易失败,失败后删除 firmware 文件夹换热点重试
ros2 run micro_ros_setup create_firmware_ws.sh generate_lib自定义消息类型
bash
# 类似ROS2自定义接口
cd firmware/mcu_ws
# 创建自定义消息包
ros2 pkg create --build-type ament_cmake my_custom_message
cd my_custom_message
mkdir msg
# 创建自定义消息类型
touch msg/MyCustomMessage.msg在MyCustomMessage.msg文件中编写自定义信息
txt
bool bool_test
byte byte_test
char char_test
int64 int64_test
uint64 uint64_test
geometry_msgs/Point32 point32_test在CMakeLists.txt文件中添加构建项目
cmake
...
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/MyCustomMessage.msg"
DEPENDENCIES geometry_msgs
)
...在package.xml中添加包依赖
xml
...
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>
<depend>geometry_msgs</depend>
...构建消息
bash
#工作区根目录执行
ros2 run micro_ros_setup build_firmware.shmcu_ws编译库文件
bash
# 创建编译配置文件,文件内容见参考内容
touch my_custom_toolchain.cmake
touch my_custom_colcon.meta
# 编译库文件,编译成功后库文件在
ros2 run micro_ros_setup build_firmware.sh $(pwd)/my_custom_toolchain.cmake $(pwd)/my_custom_colcon.metamy_custom_toolchain.cmake 参考:给编译器看的配置文件
cmake
set(CMAKE_SYSTEM_NAME Generic)
set(CMAKE_CROSSCOMPILING 1)
set(CMAKE_TRY_COMPILE_TARGET_TYPE STATIC_LIBRARY)
# 1. 设置编译器名称 (请确保你在终端输入 arm-none-eabi-gcc -v 能看到版本)
set(CMAKE_C_COMPILER arm-none-eabi-gcc)
set(CMAKE_CXX_COMPILER arm-none-eabi-g++)
set(CMAKE_C_COMPILER_WORKS 1 CACHE INTERNAL "")
set(CMAKE_CXX_COMPILER_WORKS 1 CACHE INTERNAL "")
# 2. 设置编译参数 (针对 Cortex-M4F)
set(FLAGS "-O2 -ffunction-sections -fdata-sections -fno-exceptions -mcpu=cortex-m4 -mthumb -mfloat-abi=hard -mfpu=fpv4-sp-d16" CACHE STRING "" FORCE)
# 3. 把参数应用到 C 和 C++ 编译器
set(CMAKE_C_FLAGS_INIT "-std=c11 ${FLAGS} -DCLOCK_MONOTONIC=0 -D'__attribute__(x)='" CACHE STRING "" FORCE)
set(CMAKE_CXX_FLAGS_INIT "-std=c++11 ${FLAGS} -fno-rtti -DCLOCK_MONOTONIC=0 -D'__attribute__(x)='" CACHE STRING "" FORCE)
set(__BIG_ENDIAN__ 0)my_custom_colcon.meta 参考:给 colcon build 构建工具看的配置文件。
json
{
"names": {
"tracetools": {
"cmake-args": [
"-DTRACETOOLS_DISABLED=ON",
"-DTRACETOOLS_STATUS_CHECKING_TOOL=OFF"
]
},
"rosidl_typesupport": {
"cmake-args": [
"-DROSIDL_TYPESUPPORT_SINGLE_TYPESUPPORT=ON"
]
},
"rcl": {
"cmake-args": [
"-DBUILD_TESTING=OFF",
"-DRCL_COMMAND_LINE_ENABLED=OFF",
"-DRCL_LOGGING_ENABLED=OFF"
]
},
"rcutils": {
"cmake-args": [
"-DENABLE_TESTING=OFF",
"-DRCUTILS_NO_FILESYSTEM=ON",
"-DRCUTILS_NO_THREAD_SUPPORT=ON",
"-DRCUTILS_NO_64_ATOMIC=ON",
"-DRCUTILS_AVOID_DYNAMIC_ALLOCATION=ON"
]
},
"microxrcedds_client": {
"cmake-args": [
"-DUCLIENT_PIC=OFF",
"-DUCLIENT_PROFILE_UDP=OFF",
"-DUCLIENT_PROFILE_TCP=OFF",
"-DUCLIENT_PROFILE_DISCOVERY=OFF",
"-DUCLIENT_PROFILE_SERIAL=OFF",
"-DUCLIENT_PROFILE_STREAM_FRAMING=ON",
"-DUCLIENT_PROFILE_CUSTOM_TRANSPORT=ON"
]
},
"rmw_microxrcedds": {
"cmake-args": [
"-DRMW_UXRCE_MAX_NODES=5",
"-DRMW_UXRCE_MAX_PUBLISHERS=5",
"-DRMW_UXRCE_MAX_SUBSCRIPTIONS=5",
"-DRMW_UXRCE_MAX_SERVICES=4",
"-DRMW_UXRCE_MAX_CLIENTS=4",
"-DRMW_UXRCE_MAX_HISTORY=4",
"-DRMW_UXRCE_TRANSPORT=custom"
]
}
}
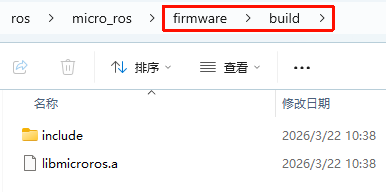
}编译成功之后firmware/buid路径下有以下文件,这就是我们需要的 mirco-ROS 库。
加入STM32工程
bash
# 拉取官方 CubeMX 例程
git clone https://github.com/micro-ROS/micro_ros_stm32cubemx_utils.git拉取下来项目目录如下图所示:
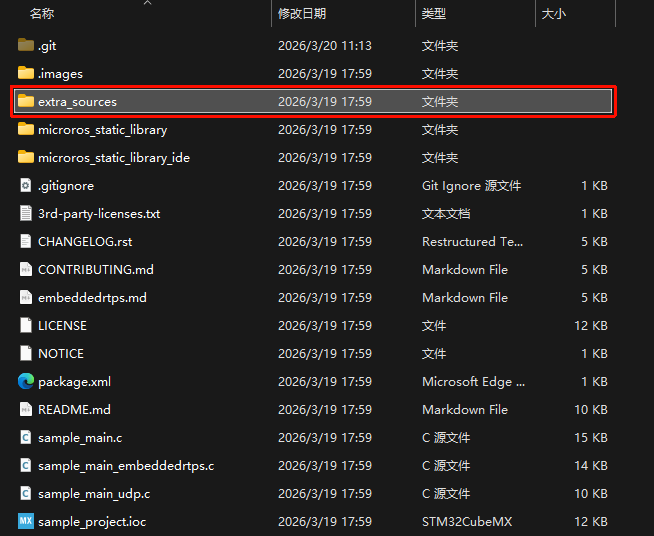
extra_sources文件夹内存放的是 micro-ROS 与 STM32 HAL 库之间的适配层代码,这里选择串口通信,将以下源代码文件添加到你的项目中:
extra_sources/microros_time.cextra_sources/microros_allocators.cextra_sources/custom_memory_manager.cextra_sources/microros_transports/dma_transport.c。
代理端构建
bash
# 在工作区运行以下代码
ros2 run micro_ros_setup create_agent_ws.sh
# 构建代理
ros2 run micro_ros_setup build_agent.sh
source install/local_setup.bash
# 运行代理
ros2 run micro_ros_agent micro_ros_agent